
腕の動きと連動するロボットアームの開発

「++A&T 05 クワクボリョウタ×SCARTS×札幌の中高生たち「キョウドウ体/syn体」ワークショップ」で使用した腕の動きと連動するロボットアームの開発の一部を担当いたしました。
企画概要
参加者が4人グループになり,1体の4本のロボットアームが取り付けられたSyn体(下図)を操作する。4人はそれぞれ1本のアームを担当し,腕を動かすことで操作する。

システム構成
腕のセンサの情報を取得するマイコン,Syn体に取り付けるロボットアーム,それらの情報を管理し適切に送信するサーバの3構成になっている。
マイコンは安価でWi-Fiモジュールを搭載したESP32,センサはLSM9DS1,サーボモータはFS5115M,サーバはProcessingを使用した。
センサとマイコン
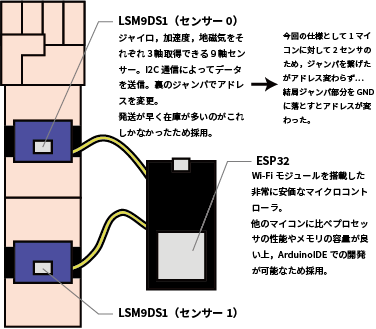
腕の動き(腕の姿勢)を推定するためのセンサーとして9軸(加速度,ジャイロ,地磁気)センサーを用いた。その情報をマイコンで処理し,腕の姿勢を表すクォータニオンをサーバに送信する。2つのセンサを用い,センサ0で肘関節による姿勢を,センサ1で肩関節による姿勢を推定する。
ロボットアームとマイコン
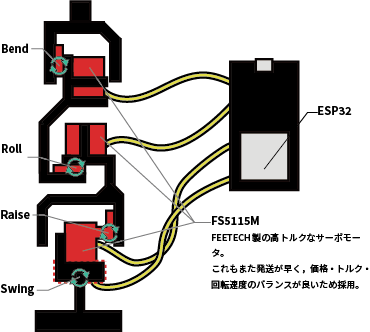
サーバから関節の角度情報をマイコンで受け取り,4つのサーボモータにより再現。左右を X 軸,上下を Y 軸,奥行きを Z 軸としたとき肩関節による腕の Y 軸回転を Swing,X 軸回転を Raise,Z 軸回転を Roll,肘関節 の動きを Bend とし,上記のモータが対応する。
サーバ
通信規格
人間とSyn体の自由度を確保するため,ワイヤレス通信を行う。また,腕とロボットアームの連動には連続的で高速な通信が必要である上,通信が途切れた際の保守性の高さからUDP通信を使用するOSC(OpenSoundControl)という通信規格を採用した。IPアドレス,ポートを指定することで通信をおこなうことができる。
データの加工
センサーから取得したデータから推定された腕の姿勢を示すクォータニオンを受け取る。クォータニオンのデータをモータを操作しやすいオイラー角に変換し,サーボを制御するマイコンに送信。