
ベジラン(画像認識を用いた借り物競走)

遊びの中で画像認識の面白さに気づいてもらうことを目的としたキット。ユカイ工学でのインターンで2週間かけ、企画・開発。画像(野菜)認識の結果に合わせて走ってくれます。吉松は画像認識のモデル作成とカメラ周りを担当。
ベジラン。それは画像認識を駆使した、ターゲットが小学生と思えないほどのバカゲー。
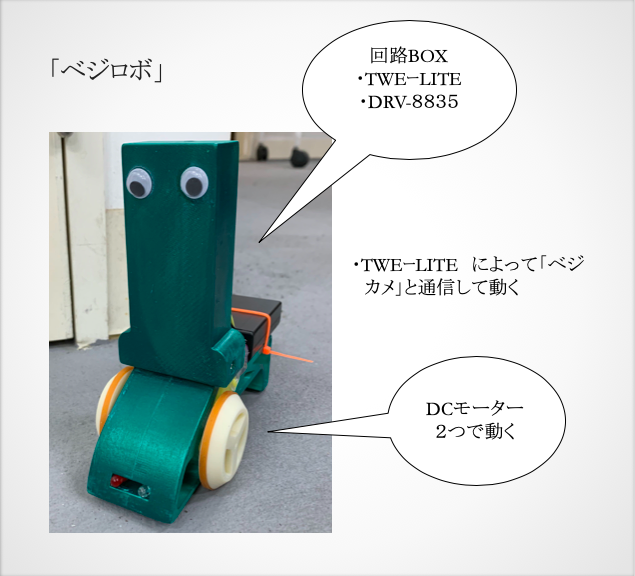
キットは、サムネ左の「ベジカメ」と右にいる「ベジロボ」の二つから構成される。
①どんな野菜かを「ベジカメ」が判断し「ベジロボ」に野菜の名前を伝えます。
※ベジカメは野菜の名前をあまり知らないため知っている野菜の中で判断します。
②「ベジロボ」は好き嫌いが激しいため、野菜の種類に応じてテンションが変わり行動が変わってくるのです。
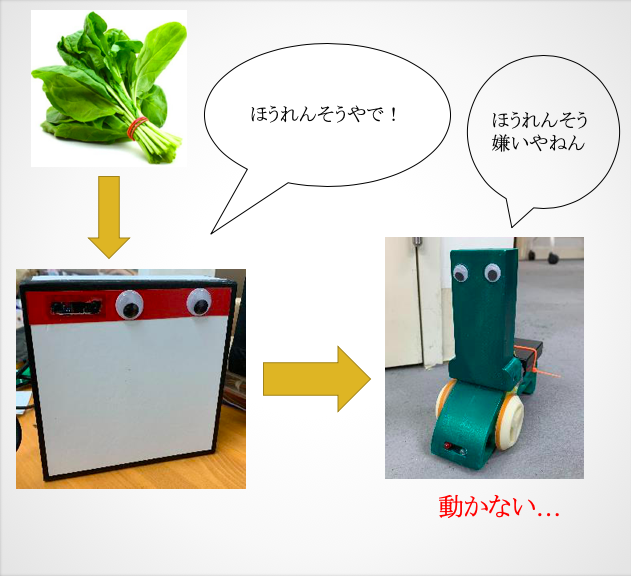
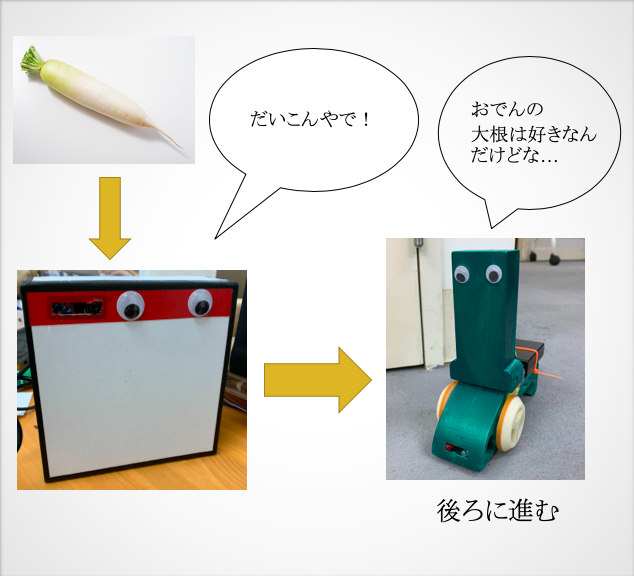
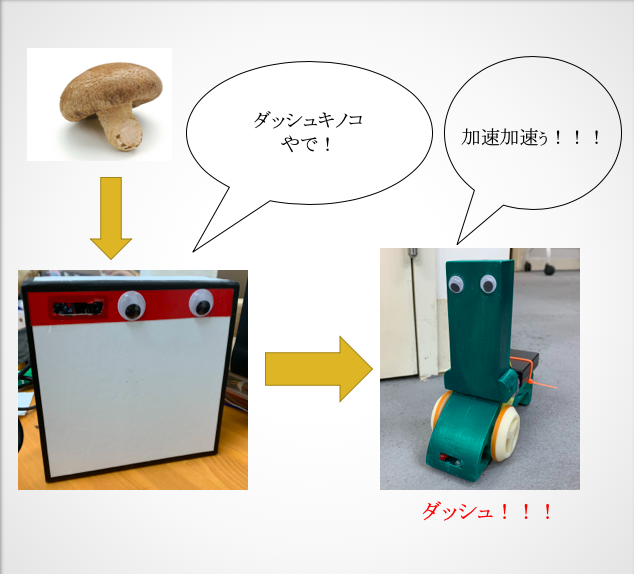
「ぶどうなら前進」「ほうれん草なら後退」「しいたけなら加速」「バナナならスピン」みたいな感じで、画像認識の結果に合わせてロボットが動いてくれる。
遊び方の例
実物の野菜を持ってきて「ベジロボ」をゴールまで連れて行こう!
野菜のイラストを描いて「ベジカメ」に見せてみよう!
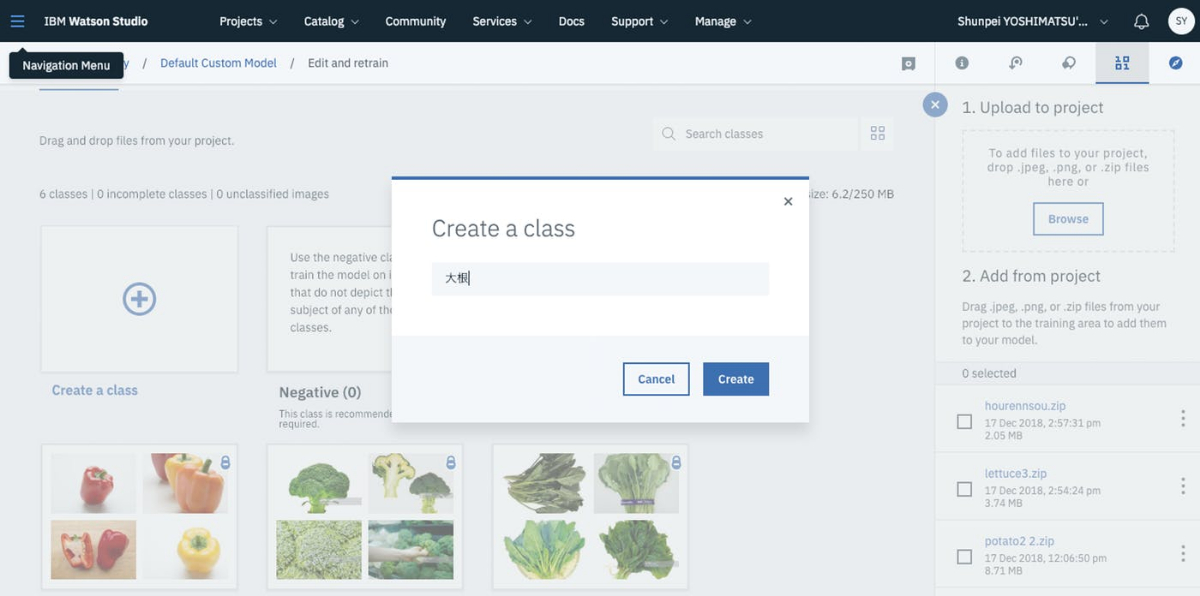
IBM Cloudのアカウントを持っていれば、子供が仕組みを理解してくるのに合わせて、画像認識モデルをブラウザ上からでもカスタマイズできるようにしてあります。遂に小学生にもIBM Cloudのアカウントを持たせる時代が来たか。
ユーザにもたらす体験のイメージ
認識して走るだけの簡単なキットにすることで、遊び道具としての余白を作ることを意識して開発していました。
これは、最低限の例を示せば、あとは子どもたちが自ら遊び方を考えて楽しんでくれるのでは、という狙いがあったためです。
また、画像認識ではどんなモノや絵を見せたとしても、学習させた中で一番尤もらしい解を出すことで、どんな状況でも「それっぽく」振る舞うように調整。みんなが書いた絵に対してAIが勝手に判定してくれます。
これは僕が大学で学んでる「特定の状況で正確に動作するシステムづくり」とは真逆な気がします。ですが、いつでもどこでも、それとなく動いてくれる方が、エンタメとして、または人間の相手として。
より心地良くて、より面白い仕掛けになるのではないか。そう考えるようになりました。
イメージを実現するために用いた技術

画像認識では、ユーザが画像を集めて学習させられる、IBM WatsonのVisual Recognitionを採用。
途中で吹っ飛ぶこともありました。学習データと画像全部です。インターン最終日に襲ったこのアクシデントは悲劇としか言いようがありません。ですが、チームメンバーにアカウントを作り直してもらい、最終発表にはなんとか間に合わせることができました。
ベジカメーベジロボ間の通信では、当初esp32を考えてましたが、最終的にはTWELITEを用いた無線通信で認識結果を元にPWM出力させることに。
無線にしたことで、ベジカメが外部のネットワークに繋がりさえすれば屋外でも遊べるようにできた。
今後は野菜図鑑を増やすとともに、ベジカメにディスプレイをつけて持ち運び可能にし、SNS上のユーザグループで、画像や遊び方のアイデアを共有できる環境を整えることで遊びの幅を広げたらもっともっと面白くなる気がします…!